 Driving railway vehicles
Driving railway vehicles
- Driving rail vehicles biaxial - line 211
- Driving rail vehicles triaxial - A 314
- Driving rail vehicles quadriaxial - A 415
Special driving railway vehicles for light shunting and manipulation with railway wagons designed to ensure technological production operator onsite loading and unloading takes place. Cable shunting devices
Cable shunting devices is designed for the rail cars shunting during their loading and unloading at the sidings, filling stations of liquid products and terminals. The device is able, according to the local conditions, to put in move and to brake the rail cars set with the total weight of up to 2500 t, device PZ 15 of up to 500 tons in both directions.
Cable shunting devices
Cable shunting devices is designed for the rail cars shunting during their loading and unloading at the sidings, filling stations of liquid products and terminals. The device is able, according to the local conditions, to put in move and to brake the rail cars set with the total weight of up to 2500 t, device PZ 15 of up to 500 tons in both directions. Special equipment
Special equipment
- Dynamic manipulator HW1E
- Electromechanical Train Wheel Stopper EMVZ-02
- Rail locking mechanism KAM-60-8
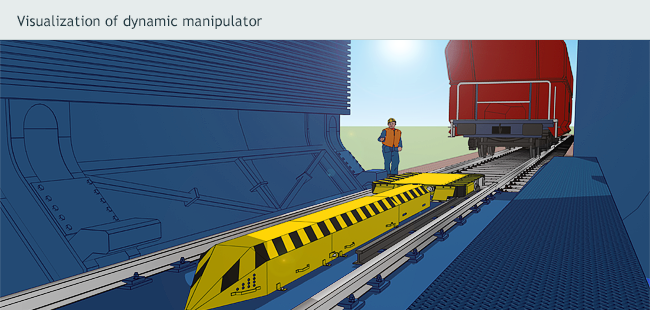
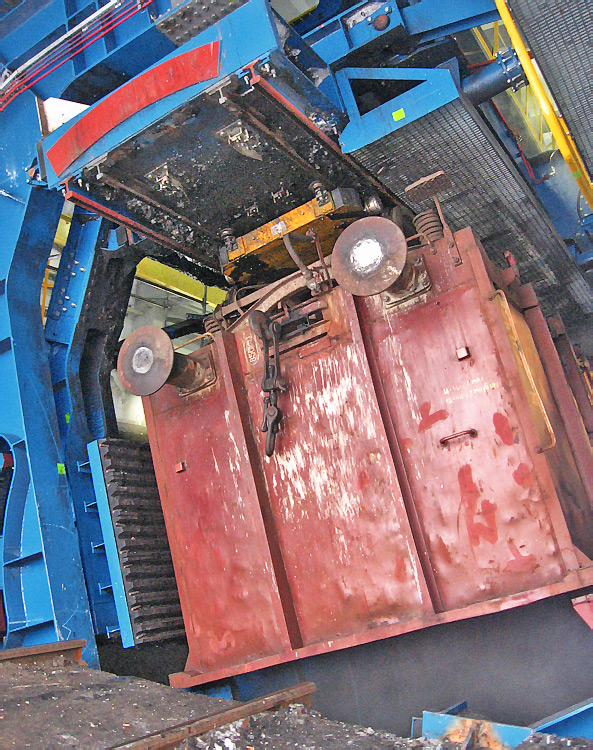
The dynamic manipulator HW1E has been developed for the wagons rotary tipplers with aim to catch and stop incoming loaded wagons, their appropriate arrangement, and once they are unloaded, their pull out. An important condition is the observance of the velocity of incoming wagons, which can be guaranteed.
Electromechanical Train Wheel Stopper EMVZ-02 has been developed for places on marshalling yards and railway sidings, where the track operator regularly secures the wagons with a wheel stopper.
Rail locking mechanism KAM-60-8 is intended for locking and holding stationary railway wagons on inclined lines during operation with individual wagons.
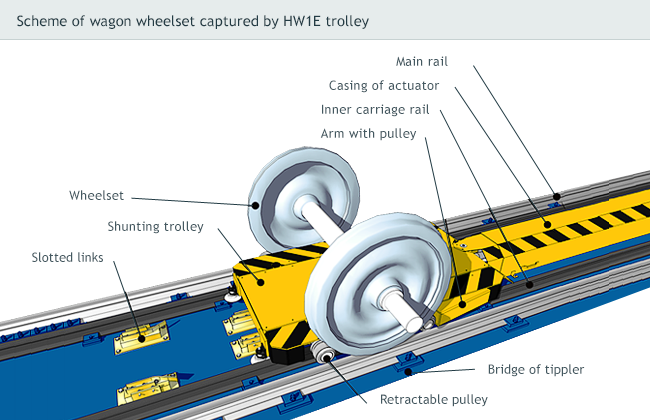
Dynamic manipulator HW1E
The dynamic manipulator HW1E has been developed for the wagons rotary tipplers with aim to catch and stop incoming loaded wagons, their appropriate arrangement, and once they are unloaded, their pull out. An important condition is the observance of the velocity of incoming wagons, which can be guaranteed, for example, by cable shunting device in front of the tippler.
Basic description
The main compositional elements of the dynamic manipulator are shunting trolley, electric actuator with piston, inner rails, slotted links and distributor with the control system.
The shunting trolley HW1E is based on the design of LTV-PV and complemented with the sensors signalling the wagon wheelset arrival on the back pushing arms of the trolley. The front trolley rollers are in charge of braking in-pushed wagon (or a pair of wagons), which is captured by the arms and subsequently arranged by the trolley at designed place.
After the tippler drum with wagon turns, the wagon is emptied and returned to the original position, there occurs a dynamic ejection of the wagon. Once the HW1E device with wagon reaches the end of its carriageway, it drives into the slotted links and puts down all pulleys, therefore the wagon wheels are free to move and the wagon leaves the tippler.
Technical description
The basic element of this system is electric actuator as an action member generating a pushing and pulling force towards the reference point. Then principle of the actuator’s performance involves the transfer of rotary movement into the linear one. The piston of actuator is capable to step up to 1750 mm.
The motor, its braking power, as well as the speed of piston (trolley) ejection is controlled by the control system. The frequency converter enables the selection of various modes of operation and is able, in conjunction with the electric motor, to provide necessary acceleration of the shunting trolley. The electro-dynamic brake EDB that is in operation during the braking will convert gained electric power into the thermal one. The position of the trolley is at all times detected by the encoder located at the rear electric motor roller and its SCADA control system collaborates with the cable shunting devices in front of the tippler.

Download Type list »
Fill in the questionnaire for particular specification of the equipment »
Special equipment
| Questionnaire | Type List | Photo Gallery |
| Basic technical data HW1E | ||
|---|---|---|
| Handling | 1 wagon | 2 wagons |
| Electric motor power | 13,2 kW | 15 kW |
| Max. braking power | 33 kN | 54 kN |
| Max. pus power | 10 kN | 12 kN |
| Max. weight of wagon | 80 t | 190 t |
| Max. velocity of incoming wagon | 1 m/s | |
| Max. length of trolley shunting | 1500 mm | 1750 mm |
| Total length of device | 7 000 mm | |







Mostárenská 2917/40
703 00 Ostrava-Vítkovice
Phone: +420 601 302 840
Czech Republic




